ミドルウェアって?
ロボット開発では、センサー・モーター・カメラ・AI・ネットワークなど、さまざまな機能を組み合わせて動かす必要があります。
しかし、それらを一つのプログラムの中で直接制御しようとすると、構造が複雑になり、開発・管理の負担が大きくなってしまいます。
そこで活躍するのが「ミドルウェア」です。
ミドルウェアとは、ハードウェアとアプリケーションの橋渡しを行うソフトウェアで、各機能を独立したモジュールとして接続・通信させる役割を担います。
例えば、ロボットでは、「センサーの値を取得して共有する」「モーター制御を別プロセスから呼び出す」といった基本的な処理をミドルウェアが担当し、開発者はより高度なアルゴリズムや制御ロジックの実装に集中できるようになります。
ROS2って?
ロボット開発用のミドルウェアとして最も広く使われているのが「ROS(Robot Operating System)」です。
その次世代版として登場したのが ROS2(Robot Operating System 2) で、現在は世界中の研究機関や企業が採用しています。
小型の教育用ロボットから自律走行車、産業用ロボットまで、あらゆる分野で活用されています。
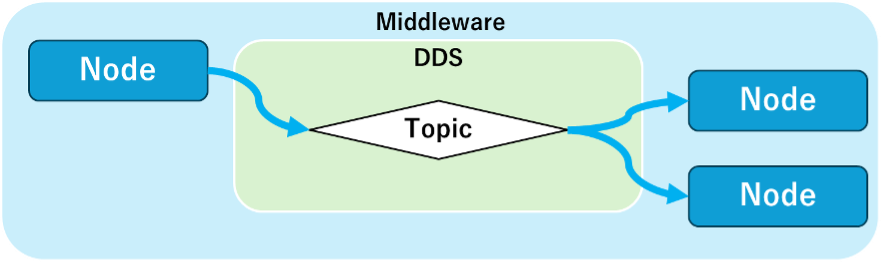
ROS2では、各機能を「ノード」と呼ばれる小さなプログラム単位に分割し、「トピック」や「サービス」といった仕組みを通じて相互に通信させます。これにより、センサーのデータ取得・モーター制御・経路計画・GUIなどを独立して開発・管理できるようになり、チーム開発や機能の再利用性が格段に向上します。
さらに、ROS1から大きく進化した点として「DDS(Data Distribution Service)」を採用した通信基盤が挙げられます。これにより、リアルタイム性が求められる制御や複数ロボット間でのデータ共有がスムーズに行えるようになり、産業応用にも十分耐えられる柔軟な設計が実現されています。
実例
ROS2は研究開発だけでなく、実際のロボット製品開発でも活用されています。
私たちの開発チームでも、ROS2を活用して屋外で自律走行が可能なロボットを開発しています。センサー情報の統合、自己位置推定、経路生成、モーター制御といった複数の処理をROS2上で連携させることで、複雑なシステムをシンプルな構造で実現できます。
【HIKYAC】つくばチャレンジ2024 11/23 実験走行 完走!
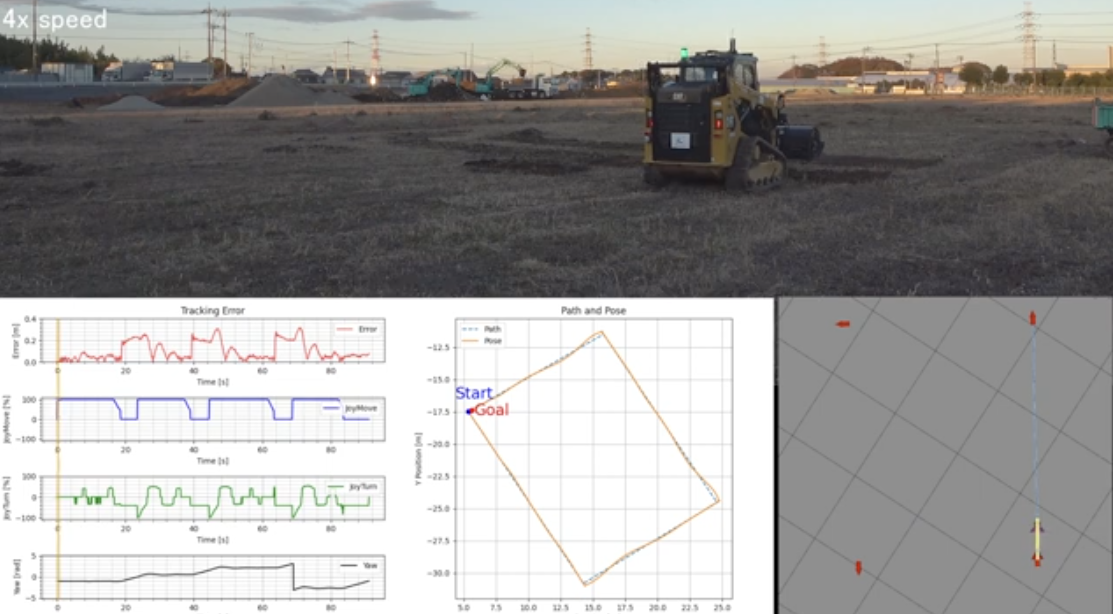
また、建設現場で使われる「スキッドステアローダ」と呼ばれる機械でも、ROS2を基盤とした自律走行システムの開発が進められています。産業機械の制御にも十分耐えられる信頼性と拡張性を持つことが、ROS2の大きな特徴です。
スキッドステアローダの自律走行システムのデモ