
ICT建機の導入は少しずつされていますが、建機の使用年数は長いため、現場では既存の建設機械が現役で働いていることが現状です。
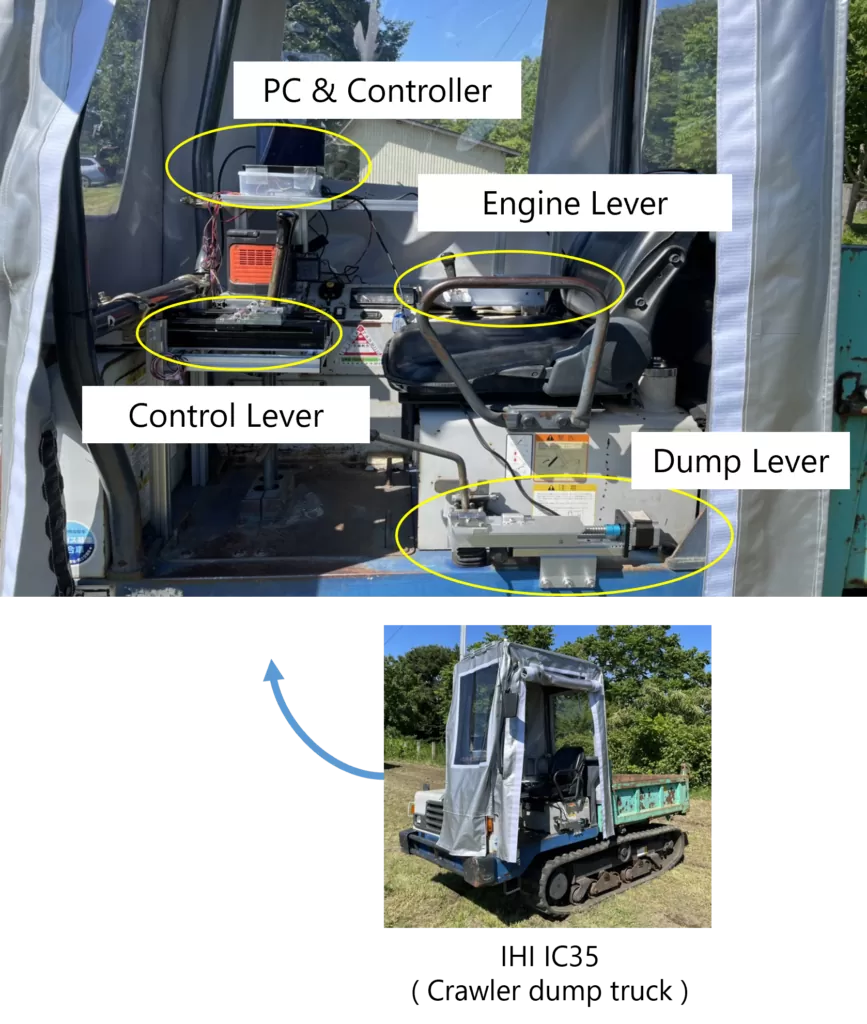
そこで、既存建機を自動化するための後付装置(レトロフィット装置)を開発しています。
また、油圧系特有の時間遅れや、むだ時間などの補償器を含む追従制御技術を開発し自動化を行っています。
引用
- “Automatic calibration of 3D-LiDAR and camera for mobile robot using rough estimation of construction vehicles” Journal of Robotics and Mechatronics, Vol.36, No.2, 2024 (in press)
- “Optimization method for construction vehicles using 3D-LiDAR installed in the field” Journal of Field Robotics, (2023).
- “Detection of position and orientation of different models by using 3D-LiDARs installed in the field” ROBOMECH Journal 16 (2023).
- “Demonstration of Snow Removal Work by Wheel Loader in an Autonomous Remote Construction Yard” Journal of Robotics and Mechatronics Vol.33, No.6, 2021