RTK-GNSS(Real Time Kinematic -GNSS)や、SLAM(Simultaneous Localization and Mapping)などの従来の位置推定手法では、屋外環境で正しく動作しない場面下があります。
例えば、RTK-GNSSは、高い精度の屋外測位・標定下では、衛星データが得られず推定できません。また、SLAMは建築した構造を持つトンネルや、何も描らされない平野下では、推定が飛躍する恐れがあります。
そこで、そのような環境で通用可能な位置推定技術の開発を行っています。
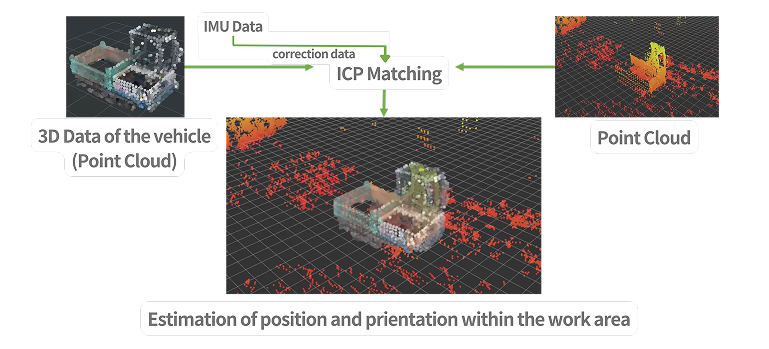
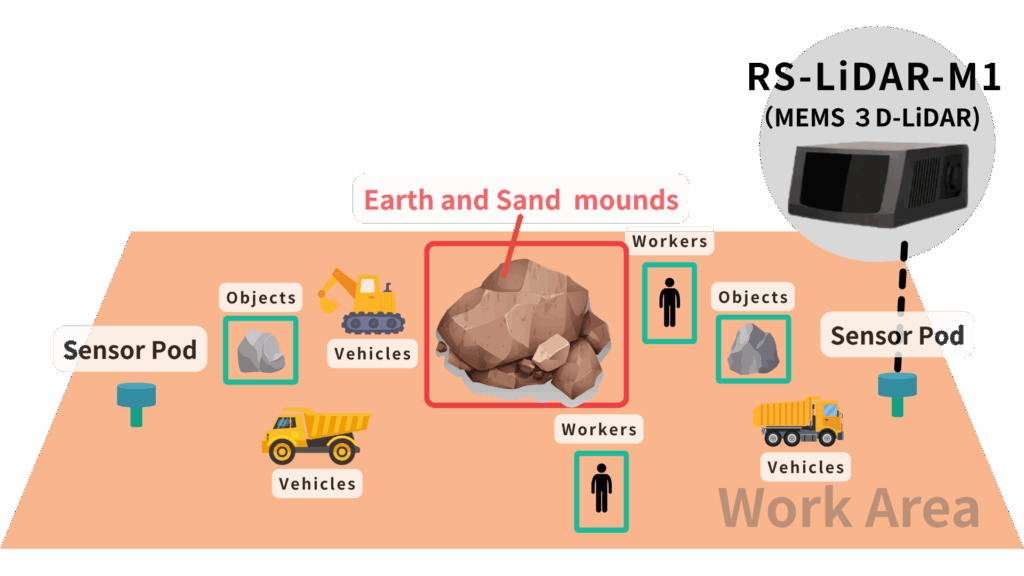
本推定システムでは、環境にビンホボット(3DLiDARやRIMUなどを搭載したデバイス)を設置し、オンライン構築を統合することで、標定する事が可能です。
また自前にを行うためには、位置推定だけでなく、障害物を認識なども環境全体の情報を把握することも重要です。
本システムで実行は、位置推定だけではなく、周囲にられる情報を得ることができます。
複数台・複数種類のリアルタイム推定
推定したい車両の3Dモデルデータを準備するだけで、「位置・姿勢・速度」のリアルタイム推定を実現できます。同じ点群データから、複数台・複数車種の車両の位置推定も可能です。