

事業紹介
シサクウェアでは、ロボット技術の普及を目指して、3つのサービスである『提供・普及・創出』を展開しています!

提供サービス
ロボット請負開発事業
アイデアはあるけど、どう形にしたらいいかわからない…。
試作品を作って検証したいけど時間がない…。
そんな時、シサクウェアが全力で貴社をサポートします!
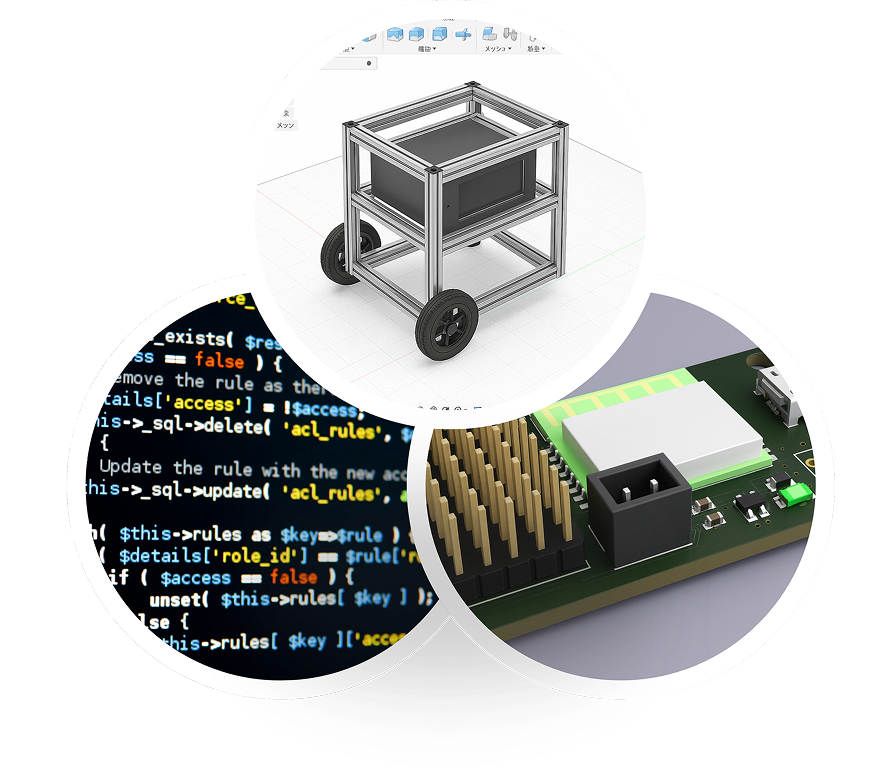
Hardware & Software
研究開発 R&D
2
ヒアリング
Webミーティングなどを通じて、詳しい内容をお聞きいたします。
3
分析とご提案
ご相談内容に対して、どのような技術的課題があるかを把握・分析した上で、開発スケジュールとお見積りをご提案いたします。
4
アジャイル開発
開発スケジュールに従い、適宜開発を行います。
逐次作業進捗をお伝えし、開発内容に齟齬がないかを確認していただきます。
また,ご要望であればモジュール単位でのテスト結果もお伝えいたします。
5
納品・検収
制作物の納品を行い、最終的な内容に不備がないか確認していただきます。
6
保守・点検
必要に応じて、制作物の保守点検業務を行います。
※別契約となる場合がございます
ロボットの研究開発は、ハードウェア・ソフトウェアという要素開発も大事ですが、 それをちゃんと組み合わせて「ひとつの動くシステム」にするという難しい作業が必要になります。
シサクウェアは、ロボット工学の知識はもちろん、いろんな現場で試作や研究開発を重ねてきた経験があるので、ちょっと変わったアイデアや、途中で止まってるプロジェクトでも大歓迎です!
「動くところまで持っていく」のが、私たちの得意分野。
まだふわっとした構想でもOKです。一緒に試して、一緒に形にしていきましょう!
普及サービス
ロボットキットの制作・販売
ロボットって、意外と身近でおもしろい!
そう感じてもらうことが、技術を社会に根付かせる第一歩です。
未来の技術者を教育するだけでなく、一般の方にもロボットの楽しさを広めることが大事だと考えています!
机で動かせる小型教育用ロボット

机で動かせる小型教育用ロボット
第1回ロボット・プログラミング講座 (成蹊大学理工学部の竹園研究室とコラボ)




研究開発R&D
ロボットに関わるコア技術の自社研究
シサクウェアは、ロボットの試作をもっとラクに、もっと面白くするために、日々研究と開発を重ねています。
毎日が実験、毎日が挑戦。
「どうすれば、もっとスムーズに試せるか?」
「試作を”作業”じゃなくて、”ワクワクする体験”にできるか?」
そんなことを考えながら、製品やシステムの開発方法そのものをアップデートしています。
現在は、ロボット教育に使える小型ロボットや、もっと簡単にロボットを動かせるライブラリなどの研究開発に取り組んでいます。
「試す」をもっと気軽に、もっと楽しくするための選択を、日々コツコツと積いています。
開発は好奇心が原動力。皆さんにもご紹介できるような事例です。
ぜひ楽しみにお待ちください!
